










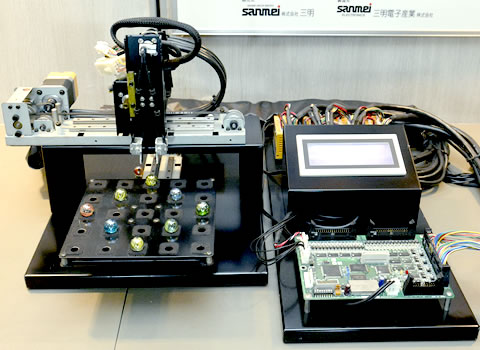
Cuty Pair
Cuty Pairは直交ロボットに必要なモータによる位置決め制御とロボット装置としての機能を実現するためのシーケンス制御を
1ボードで可能とした直交ロボット専用のコントローラです。
簡単なモーションプログラミングにより、自由度の高いロボットシステムを
お客様ご自身で実現することが可能となります。
1. 最大4軸の直線補間(同時4軸)、円弧補間(選択2軸)動作が可能!
2. MemoBusプロトコル対応のタッチパネルの接続が可能!
3. お客様のニーズにあったロボットシステムを容易に構築可能!
 三明電子産業株式会社
三明電子産業株式会社